Ученые спроектировали мягкого робота-хамелеона, язык которого за счет взрыва и специальной конструкции двигается на большие расстояния с высокой скоростью. Для поддержки и прогнозирования производительности этого робота авторы также предложили новую динамическую модель. Она может использоваться для количественной оценки энергии, которая генерируется взрывом, и прогнозирования деформации робота, для учета дополнительных факторов, например потери энергии в виде тепла, а также неполного сгорания веществ. Полученная модель потенциально может использоваться на самых ранних этапах разработки мягких роботов, быстро передвигающихся на дальние расстояния. Результаты исследования опубликованы в журнале Cyborg and Bionic Systems.
Мягкие роботы обладают рядом преимуществ по сравнению с традиционными жесткими системами. Например, они лучше адаптируются в неструктурированных условиях, имеют больший диапазон движений, меньше стоят и весят. В последние годы было разработано большое количество мягких роботов, которые имитируют движения животных. Такие роботы способны исследовать местность с помощью перемещения и изгибания в разных направлениях. Однако мягкие роботы плохо передвигаются на большие расстояния и обладают низкой скоростью. Это связано с особенностями их конструкции и системой приведения в действие, например двигателем или сжатым воздухом. Следовательно, для развития мягкой робототехники требуются новые роботы, способные быстро передвигаться на большие расстояния.
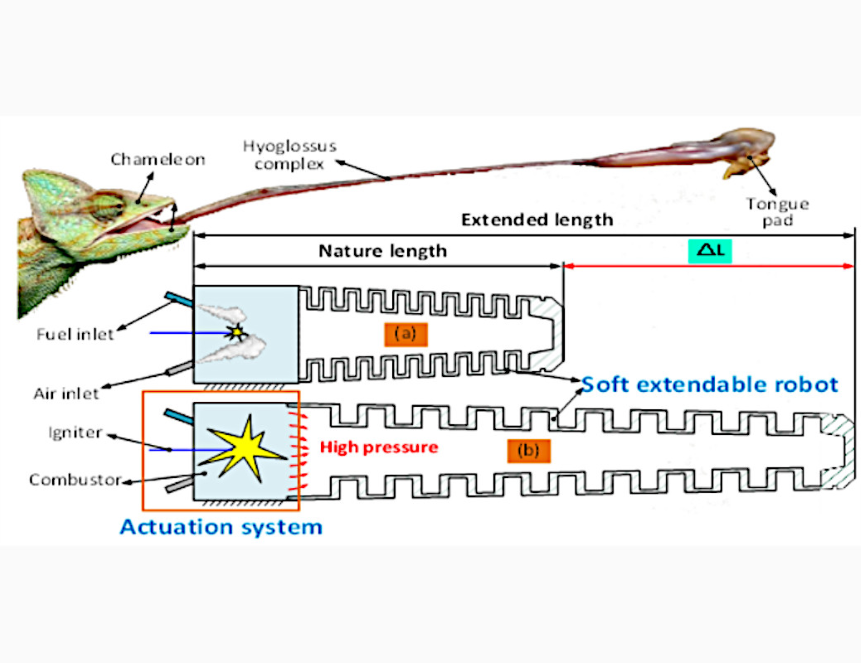
Китайские и британские ученые спроектировали робота-хамелеона среднего размера, язык которого быстро перемещался в линейном направлении. Мягкий робот был изготовлен из сверхэластичного материала, который обеспечивал удлинение. Робот состоял из трех элементов: опоры, системы приведения в действие и эластичного блока. В качестве источника топлива использовались коммерчески доступные жидкие углеводороды.
На первом этапе воздух и топливо поступали в камеру сгорания. Затем воспламенитель создавал искру, из-за чего происходил взрыв. Под действием образующегося давления язык робота-хамелеона удлинялся. В конце воздух извлекался из камеры и язык возвращался к своей изначальной длине. При этом для эффективного взрыва было необходимо контролировать массу топлива и воздуха в камере. Их соотношение определяло формирующееся давление, а также эффективность взрыва. Авторы снабдили робота электрическими переключателями, которые управляли массой топлива и воздуха. Привод обладал высокой мощностью и простой конструкцией, а также мало весил. Робот перемещался на 41 мм при массе топлива 0,18 г. В результате новая конструкция обеспечивала высокую грузоподъемность, обладала быстрой реакцией и высокой эффективностью использования энергии.
Кроме того, авторы предложили динамическую модель, которая исследовала изменения топлива, взаимосвязи между давлением горения и деформацией мягкого робота, а также основывалась на свойствах сверхупругой силиконовой резины, лежащей в основе мягких роботов. Модель позволяла рассчитать давление при заданных условиях, предсказать энергию, которая генерируется взрывом, а также деформацию робота. Кроме того, она учитывала потери энергии в виде тепла и неполное сгорание. Таким образом, разработанная модель может помочь в проектировании роботов на начальных этапах.
Автор: Анна Дегтярь.
Подписывайтесь на InScience.News в социальных сетях: ВКонтакте, Telegram, Одноклассники.